


This is an example project description.
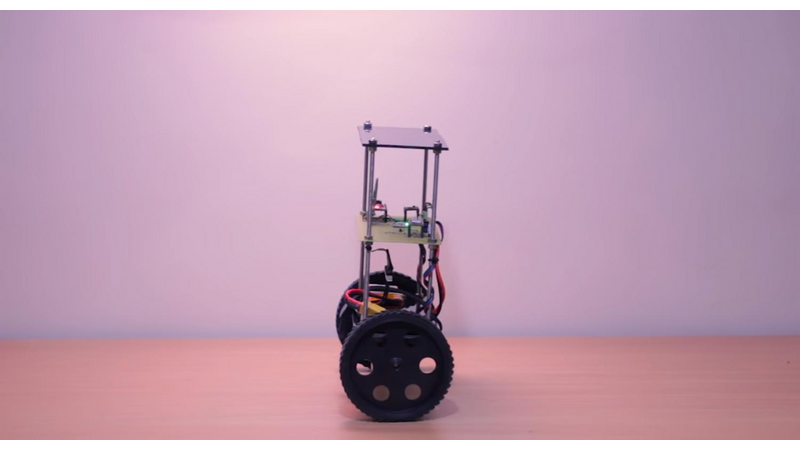
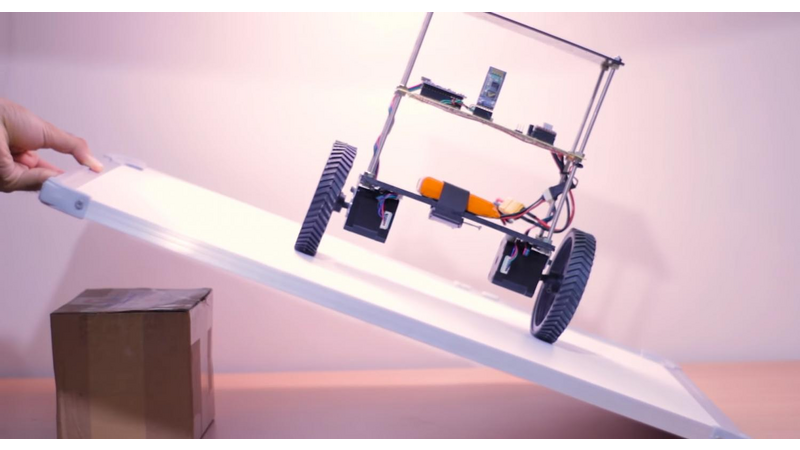
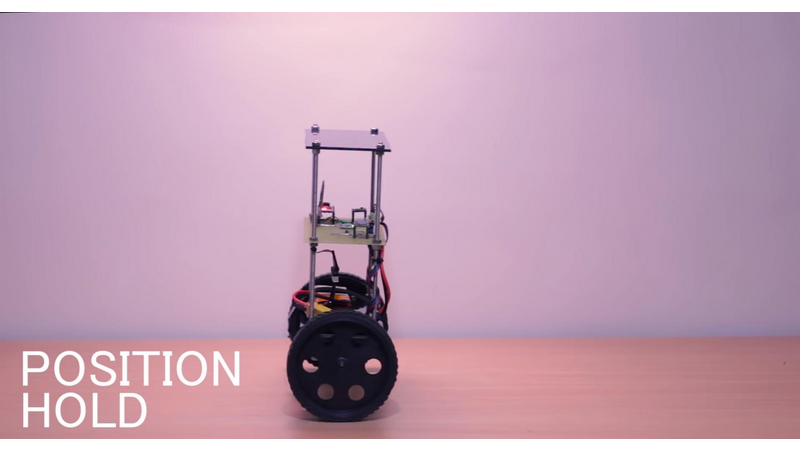
This Self Balancing Robot is a Two-wheeled Robot that balances vertically using a closed-loop algorithm. This Self Balancing Robot Features various modes like Position Hold, Simple Mode, Rise Mode and Joystick Control. This Robot is controllable by a Smartphone device or a Transmitter. Self Balancing robot uses data from the Accelerometer and Gyroscope to correct its orientation and position.
Comments (0)