



Faced with the aging of the population and the desire to give autonomy to people with disabilities, we designed an autonomous wheelchair leveraging artificial intelligence for its navigation.
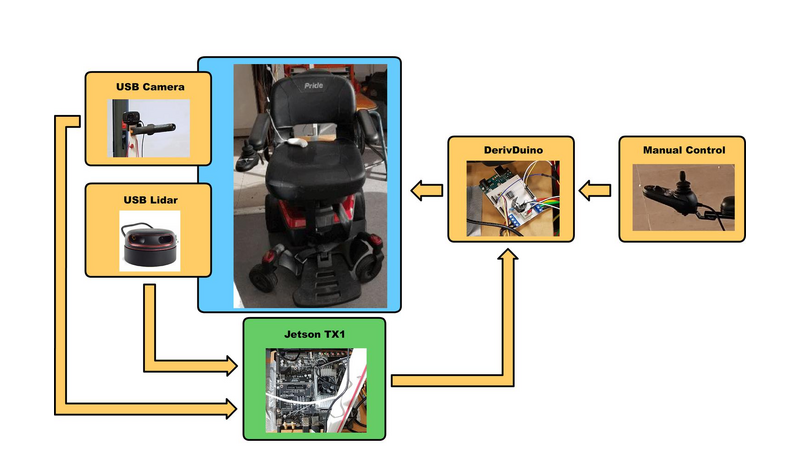
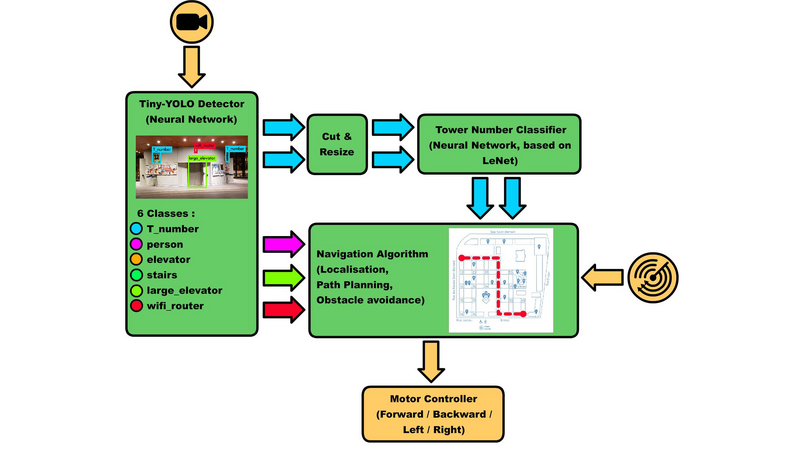
For that, we enhanced an ordinary powered wheelchair using sensors to perceive it's surroundings : a camera for location determination through a neural network and a 2D LIDAR to avoid obstacles.
We tested the autonomy of the wheelchair on the Sorbonne University campus of Jussieu. In that context, we used the numerical informations displayed on the towers to find the position of the wheelchair on the map.
This has demonstrated the faisibility of an optical only outdoor localisation system. We used artificial neural networks which is accelerated by the Cuda Cores on the NVIDIA Jetson TX1.
The challenge has been to find a way in a complex environment with limited input from commercial of the shelf (COTS) sensors.
Team :
Arthur Hennequin (Student, Sorbonne University, Master SESI)
Yann Douze (Teacher, Polytech Sorbonne)
Sylvain Viateur (Engineer, Polytech Sorbonne)
Comments (3)
HB
Harsh Bajaj
l
lasttango
k
kamel_barkaoui