


In order for robots to work in unstructured environments outside of factories and more in homes to collaborate with humans it has to be able to continually learn. However, Continual Learning is a challenging problem. Even with the recent success with deep learning in other areas such as object recognition and detection. Continual Learning and learning from limited data is still a bottleneck that has not been solved.
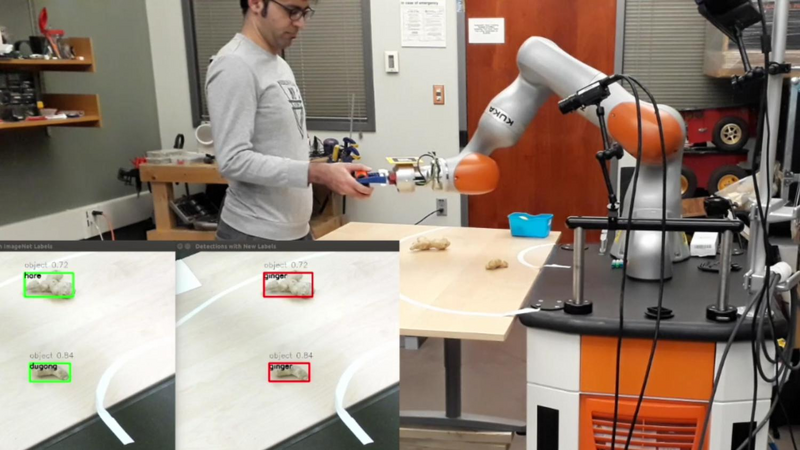
We try to address part of the problem by teaching the robot through human robot collaboration about the new objects. The robot should then be able to detect these objects and generalize to different instances within that new class.
Comments (2)
HB
Harsh Bajaj
h
hadeel_m_yussef