

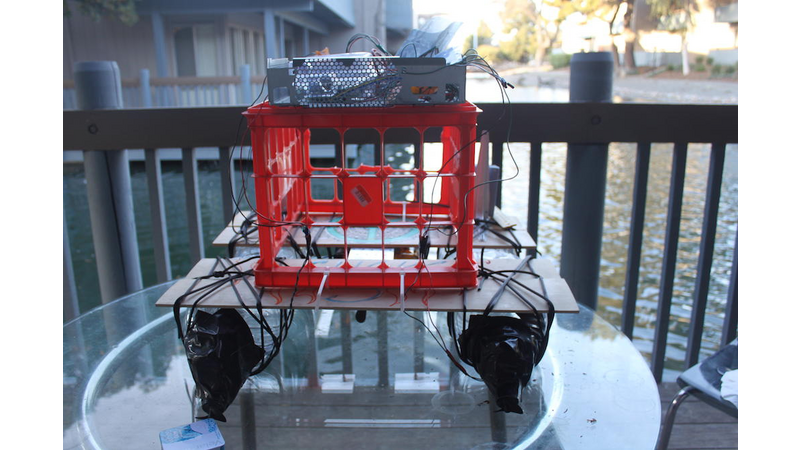
This prototype model, manufactured from recycled materials, is designed to detect floating trash, collect it autonomously, and navigate back to the drop off location when full. ROS pipelines sensor fusion and camera data running on nVidia Jetson TX2. Deep Learning powers it’s capabilities to detect trash, wildlife and obstacles on the camera image and distinguish navigable terrain from water area boundaries. More information including diagrams can be found on github.com/rkaus/ebb.
NVIDIA® Jetson™ Developer Challenge

Comments (29)
l
lacandlish
l
lacandlish
l
lacandlish
l
lacandlish
l
lacandlish
l
lacandlish
l
lacandlish
l
lacandlish
l
lacandlish
l
lacandlish